Arduino Nano 33 BLE Rev2 PWM Motor Controller A Complete Guide
The Arduino Nano 33 BLE Rev2 is a powerful and versatile microcontroller that builds upon the foundation of the popular Arduino Nano. Featuring Bluetooth Low Energy (BLE) capabilities and a robust set of features, it is ideal for a wide range of applications, including motor control. In this article, we will explore how to use the arduino nano 33 ble rev2 pwm motor controller for controlling motors via Pulse Width Modulation (PWM). Whether you are a beginner or an experienced enthusiast, this guide will provide you with all the necessary knowledge to get started with motor control using this fantastic development board.
What is the arduino nano 33 ble rev2 pwm motor controller?
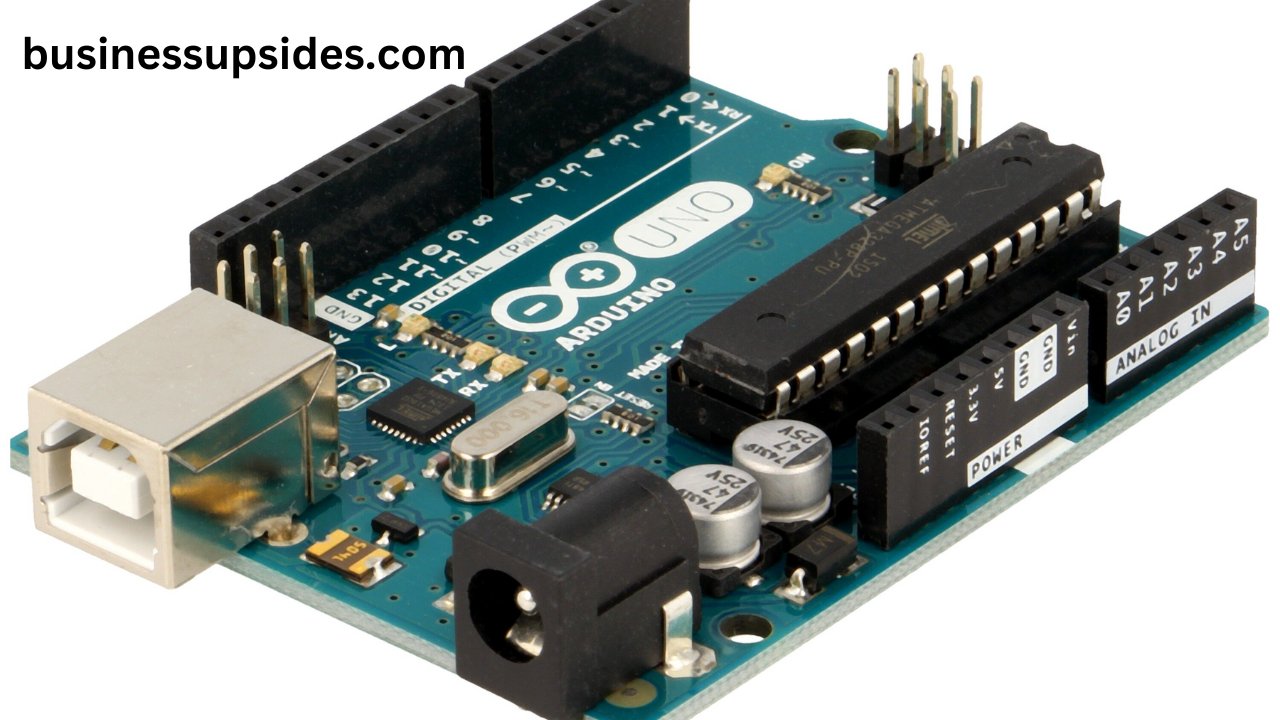
Before diving into the motor control aspect, let’s briefly discuss the Arduino Nano 33 BLE Rev2. The arduino nano 33 ble rev2 pwm motor controller is a compact board based on the nRF52840 microcontroller, designed for Bluetooth Low Energy (BLE) applications. It features a 32-bit ARM Cortex-M4 processor that runs at 64 MHz, offering ample computational power for a wide range of tasks.
Additionally, the board includes:
- Bluetooth 5.0 connectivity, allowing you to control and communicate with external devices wirelessly.
- 14 digital input/output pins, 6 of which are capable of PWM output.
- 6 analog inputs, offering flexibility for sensor integration.
- A built-in IMU (Inertial Measurement Unit), which enables motion sensing, useful for robotics applications.
- A USB-C connector for programming and powering the board.
- A 3.3V regulator, allowing the board to work with external peripherals that require 3.3V power.
The Arduino Nano 33 BLE Rev2 is designed to be an excellent choice for IoT projects, wearable devices, and robotics, making it a perfect fit for motor control applications that require efficient communication and small form factor.
Understanding PWM (Pulse Width Modulation)
Before diving into controlling motors with PWM, let’s understand what PWM is and why it’s so useful in motor control.
PWM is a method of controlling the amount of power delivered to an electrical device by varying the duty cycle of a square wave signal. The “duty cycle” refers to the percentage of time the signal is HIGH versus LOW. In simpler terms, the duty cycle controls the “on” time and “off” time of the signal.
In motor control, PWM is used to adjust the motor’s speed. By increasing the duty cycle, more power is delivered to the motor, making it spin faster. Conversely, reducing the duty cycle reduces the amount of power, slowing down the motor. This method of control is efficient because it allows precise control over the speed of the motor without generating excessive heat as a traditional resistive speed control method would.
Why Use the arduino nano 33 ble rev2 pwm motor controller?
The Arduino Nano 33 BLE Rev2 offers several advantages when it comes to motor control, including:
- Compact Size: Its small form factor makes it an ideal choice for embedded systems, robotics, and projects where space is limited.
- PWM Capability: The board has multiple PWM-capable pins (6 pins to be exact), which are necessary for controlling the speed of motors. These pins can be used to send PWM signals to motor drivers, enabling precise motor control.
- Bluetooth Connectivity: With BLE, the board can be controlled wirelessly. This feature is especially useful in IoT-based motor control applications or remote control systems.
- Powerful Processing: The ARM Cortex-M4 processor provides sufficient processing power for real-time motor control applications, including complex tasks like sensor integration and feedback control.
- Flexibility: The Arduino ecosystem provides an extensive library of functions, making it easier to control motors and integrate sensors for advanced motor control systems, including feedback loops.
These features, along with the fact that Arduino has an active community and vast online resources, make the arduino nano 33 ble rev2 pwm motor controller an excellent choice for motor control projects.
Previous article; The Art of rational cooking types How Professional Kitchens Perfect
Components Needed for Motor Control with Arduino Nano 33 BLE Rev2
To control a motor using PWM with the Arduino Nano 33 BLE Rev2, you will need the following components:
- Arduino Nano 33 BLE Rev2: The central microcontroller to manage the motor control logic.
- Motor Driver (L298N, L293D, or similar): A motor driver is needed to interface between the Arduino and the motor. The motor driver acts as a switch to control the voltage and current supplied to the motor.
- DC Motor: The motor to be controlled, which could be a simple DC motor or a more complex stepper motor, depending on your application.
- External Power Source: Depending on the motor, it might require an external power source, especially if it operates at a higher voltage than the 5V supplied by the Arduino.
- Jumper Wires: For connecting the components.
- Optional: Diode: If you’re controlling an inductive load such as a DC motor, using a flyback diode can help protect the motor driver and Arduino from voltage spikes generated when the motor is turned off.
Setting Up the Hardware for PWM Motor Control
Now that you have all the components, let’s go through the steps to connect them for motor control.
1. Connect the Motor Driver arduino nano 33 ble rev2 pwm motor controller
The motor driver will be the interface between the Arduino and the motor. For this example, we’ll use the L298N motor driver, which is a commonly used motor driver capable of controlling both the speed and direction of a DC motor.
Here’s how to connect the L298N motor driver to the Arduino Nano 33 BLE Rev2:
| Arduino Pin | L298N Pin | Description |
|---|---|---|
| 5V | VCC | Power for motor driver |
| GND | GND | Ground connection |
| Pin 9 (PWM) | ENA (Enable) | Enables the motor (PWM signal) |
| Pin 10 (DIR1) | IN1 | Motor direction control |
| Pin 11 (DIR2) | IN2 | Motor direction control |
| Motor Output | OUT1, OUT2 | Connect motor leads |
| External Power | VCC (Motor) | Power the motor |
2. Powering the System
- Arduino Nano 33 BLE Rev2 can be powered via the USB port or its 5V pin.
- The motor driver will require external power to drive the motor. For example, if you are using a 12V motor, connect a 12V power supply to the motor driver’s VCC pin. Make sure to connect the GND of the external power supply to the Arduino GND to establish a common ground.
Programming the Arduino Nano 33 BLE Rev2 to Control the Motor
Now that you’ve connected everything, let’s write the code to control the motor using PWM. We’ll start with a simple example where the motor speed is gradually increased and decreased, and the motor’s direction is switched.
This code will make the motor speed up and slow down repeatedly, changing directions at the same time. You can modify this code to suit more advanced use cases, such as controlling multiple motors or using sensors for feedback.
Conclusion
The arduino nano 33 ble rev2 pwm motor controller is a fantastic platform for motor control applications, thanks to its compact form, PWM-capable pins, and Bluetooth connectivity. By using PWM, you can efficiently control the speed of motors while minimizing energy loss and heat generation. The integration of the L298N motor driver enables you to control not just the speed but also the direction of the motor.
Whether you are building a robot, an IoT project, or an automated system, the combination of the Arduino Nano 33 BLE Rev2 and motor control techniques like PWM can help you create a wide range of exciting projects. With Bluetooth connectivity, you can even control the motor wirelessly, making your projects more flexible and interactive.
This guide provides a solid foundation for motor control using the Arduino Nano 33 BLE Rev2. From here, you can experiment with different motor types, control algorithms, and integrate sensors for more sophisticated motor control systems. Happy building!







Post Comment